.jpg)
.jpg)
.jpg)
.jpg)
नेमा २३ (५७ मिमी) हाइब्रिड स्टेपर मोटर, बाइपोलर, ४-लिड, ACME लिड स्क्रू, कम आवाज, लामो आयु, उच्च प्रदर्शन।
नेमा २३ (५७ मिमी) हाइब्रिड स्टेपर मोटर, बाइपोलर, ४-लिड, ACME लिड स्क्रू, कम आवाज, लामो आयु, उच्च प्रदर्शन।
यो ५७ मिमी हाइब्रिड स्टेपर मोटर तीन प्रकारमा उपलब्ध छ: बाह्य रूपमा संचालित, थ्रु-एक्सिस, र थ्रु-फिक्स्ड-एक्सिस। तपाईं आफ्नो विशेष आवश्यकता अनुसार छनौट गर्न सक्नुहुन्छ।
यो मोटर २० मिमी, २८ मिमी, ३५ मिमी, ४२ मिमी, ५७ मिमी, ८६ मिमी आकारमा उपलब्ध छ।
चरण लम्बाइ, ०.००१५२४ मिमी ~ ०.१२७ मिमी
प्रदर्शन २४० किलोग्रामसम्म अधिकतम थ्रस्ट, कम तापक्रम वृद्धि, कम कम्पन, कम आवाज, लामो आयु (५० लाख चक्रसम्म), उच्च स्थिति शुद्धता (±०.०१ मिमीसम्म)
विवरणहरू
| उत्पादनको नाम | ५७ मिमी हाइब्रिड स्टेपर मोटर्स |
| मोडेल | VSM57HSM को परिचय |
| प्रकारहरू | हाइब्रिड स्टेपर मोटर्स |
| चरण कोण | १.८° |
| भोल्टेज (V) | २.३ / ३ / ३.१ / ३.८ |
| वर्तमान (A) | ३/४ |
| प्रतिरोध (ओम्स) | ०.७५ / १ / ०.७८ / ०.९५ |
| इन्डक्टन्स (mH) | २.५ / ४.५ / ३.३ / ४.५ |
| सिसाका तारहरू | 4 |
| मोटर लम्बाइ (मिमी) | ४५ / ५५ / ६५ / ७५ |
| परिवेशको तापक्रम | -२० ℃ ~ +५० ℃ |
| तापक्रम वृद्धि | अधिकतम ८० हजार। |
| डाइलेक्ट्रिक शक्ति | १ एमए अधिकतम। @ ५००V, १ किलोहर्ज, १ सेकेन्ड। |
| इन्सुलेशन प्रतिरोध | न्यूनतम १००MΩ @५००Vdc |
प्रमाणपत्रहरू

विद्युतीय प्यारामिटरहरू:
| मोटरको आकार | भोल्टेज /चरण (V) | हालको /चरण (क) | प्रतिरोध /चरण (Ω) | इन्डक्टन्स /चरण (मिलिहेन्स) | संख्या सिसाका तारहरू | रोटर जडता (ग्रा.सेमी2) | मोटर तौल (छ) | मोटर लम्बाइ L (मिमी) |
| 57 | २.३ | 3 | ०.७५ | २.५ | 4 | १५० | ५८० | 45 |
| 57 | 3 | 3 | 1 | ४.५ | 4 | ३०० | ७१० | 55 |
| 57 | ३.१ | 4 | ०.७८ | ३.३ | 4 | ४०० | ८८० | 65 |
| 57 | ३.८ | 4 | ०.९५ | ४.५ | 4 | ४८० | ९५० | 75 |
लिड स्क्रू विशिष्टता र कार्यसम्पादन प्यारामिटरहरू
| व्यास (मिमी) | लिड (मिमी) | चरण (मिमी) | स्व-लकिङ बल बन्द गर्नुहोस् (न) |
| ९.५२५ | १.२७ | ०.००६३५ | ८०० |
| ९.५२५ | २.५४ | ०.०१२७ | ३०० |
| ९.५२५ | ५.०८ | ०.०२५४ | 90 |
| ९.५२५ | १०.१६ | ०.०५०८ | 30 |
| ९.५२५ | २५.४ | ०.१२७ | 6 |
नोट: थप लिड स्क्रू विशिष्टताको लागि, कृपया हामीलाई सम्पर्क गर्नुहोस्।
VSM57HSM मानक बाह्य मोटर रूपरेखा रेखाचित्र:
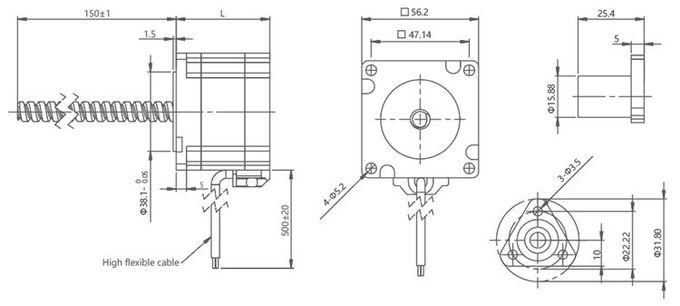
नोटहरू:
लिड स्क्रू लम्बाइ अनुकूलित गर्न सकिन्छ
लिड स्क्रूको अन्त्यमा अनुकूलित मेसिनिङ व्यवहार्य छ।
५७ मिमी हाइब्रिड स्टेपर मोटर्स मानक क्याप्टिभ मोटर रूपरेखा रेखाचित्र:
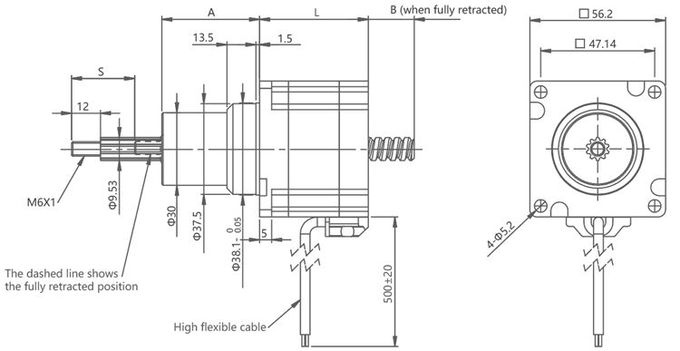
नोटहरू:
लिड स्क्रूको अन्त्यमा अनुकूलित मेसिनिङ व्यवहार्य छ।
| स्ट्रोक एस (मिमी) | आयाम A (मिमी) | आयाम B (मिमी) | |||
| एल = ४५ | एल = ५५ | एल = ६५ | एल = ७५ | ||
| १२.७ | २४.१ | १.१ | 0 | 0 | 0 |
| १९.१ | ३०.५ | ७.५ | 0 | 0 | 0 |
| २५.४ | ३६.८ | १३.८ | ४.८ | 0 | 0 |
| ३१.८ | ४३.२ | २०.२ | ११.२ | ०.२ | 0 |
| ३८.१ | ४९.५ | २६.५ | १७.५ | ६.५ | 0 |
| ५०.८ | ६२.२ | ३९.२ | ३०.२ | १९.२ | ९.१ |
| ६३.५ | ७४.९ | ५१.९ | ४२.९ | ३१.९ | २१.९ |
५७ मिमी हाइब्रिड स्टेपर मोटर मानक थ्रु-फिक्स्ड मोटर रूपरेखा रेखाचित्र
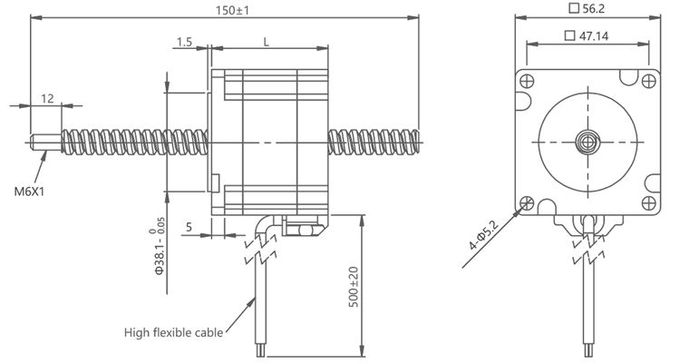
नोटहरू:
लिड स्क्रू लम्बाइ अनुकूलित गर्न सकिन्छ
लिड स्क्रूको अन्त्यमा अनुकूलित मेसिनिङ व्यवहार्य छ।
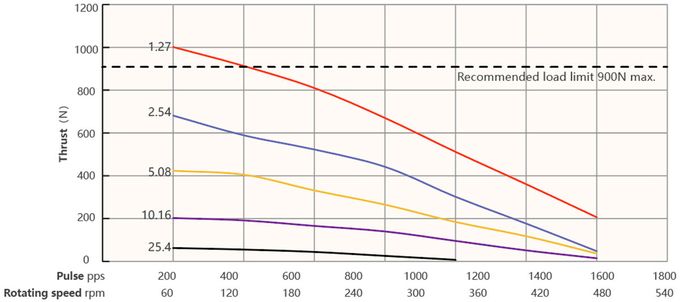
गति र जोर वक्र:
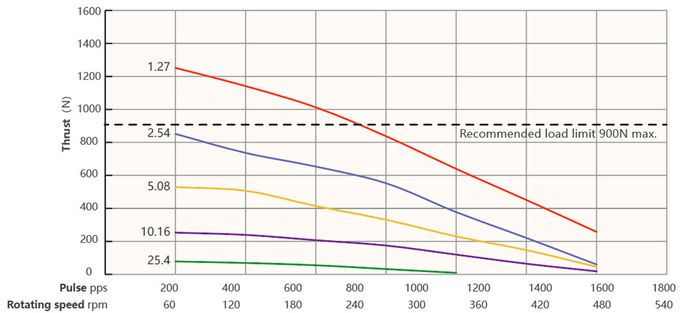
५७ शृङ्खला ४५ मिमी मोटर लम्बाइ बाइपोलर हेलिकप्टर ड्राइभ
१००% वर्तमान पल्स फ्रिक्वेन्सी र थ्रस्ट कर्भ (Φ९.५२५ मिमी लिड स्क्रू)
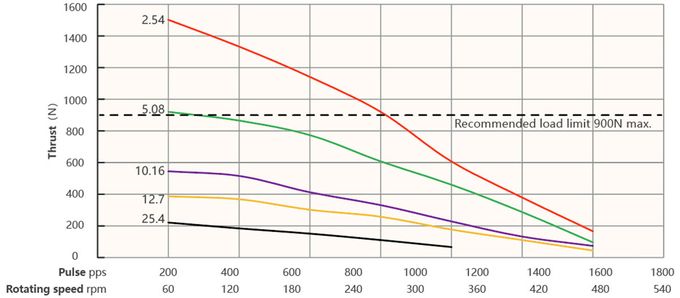
५७ शृङ्खला ५५ मिमी मोटर लम्बाइ बाइपोलर हेलिकप्टर ड्राइभ
१००% वर्तमान पल्स फ्रिक्वेन्सी र थ्रस्ट कर्भ (Φ९.५२५ मिमी लिड स्क्रू)
| सिसा (मिमी) | रेखीय वेग (मिमी/सेकेन्ड) | ||||||||
| १.२७ | १.२७ | २.५४ | ३.८१ | ५.०८ | ६.३५ | ७.६२ | ८.८९ | १०.१६ | ११.४३ |
| २.५४ | २.५४ | ५.०८ | ७.६२ | १०.१६ | १२.७ | १५.२४ | १७.७८ | २०.३२ | २२.८६ |
| ५.०८ | ५.०८ | १०.१६ | १५.२४ | २०.३२ | २५.४ | ३०.४८ | ३५.५६ | ४०.६४ | ४५.७२ |
| १०.१६ | १०.१६ | २०.३२ | ३०.४८ | ४०.६४ | ५०.८ | ६०.९६ | ७१.१२ | ८१.२८ | ९१.४४ |
| २५.४ | २५.४ | ५०.८ | ७६.२ | १०१.६ | १२७ | १५२.४ | ७११.८ | २०३.२ | २२८.६ |
परीक्षण अवस्था:
हेलिकप्टर ड्राइभ, र्याम्पिङ बिना, आधा माइक्रो-स्टेपिङ, ड्राइभ भोल्टेज ४०V
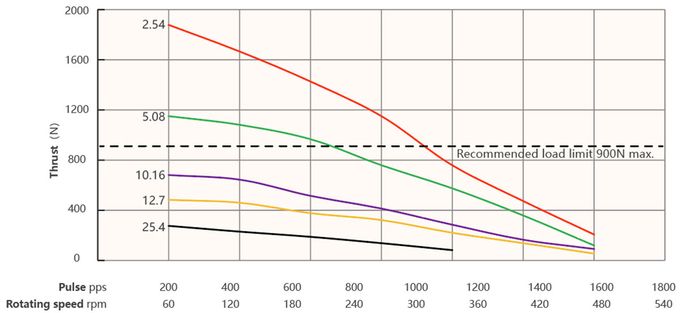
५७ शृङ्खला ६५ मिमी मोटर लम्बाइ बाइपोलर हेलिकप्टर ड्राइभ
१००% वर्तमान पल्स फ्रिक्वेन्सी र थ्रस्ट कर्भ (Φ९.५२५ मिमी लिड स्क्रू)
५७ शृङ्खला ७५ मिमी मोटर लम्बाइ बाइपोलर हेलिकप्टर ड्राइभ
१००% वर्तमान पल्स फ्रिक्वेन्सी र थ्रस्ट कर्भ (Φ९.५२५ मिमी लिड स्क्रू)
| सिसा (मिमी) | रेखीय वेग (मिमी/सेकेन्ड) | ||||||||
| १.२७ | १.२७ | २.५४ | ३.८१ | ५.०८ | ६.३५ | ७.६२ | ८.८९ | १०.१६ | ११.४३ |
| २.५४ | २.५४ | ५.०८ | ७.६२ | १०.१६ | १२.७ | १५.२४ | १७.७८ | २०.३२ | २२.८६ |
| ५.०८ | ५.०८ | १०.१६ | १५.२४ | २०.३२ | २५.४ | ३०.४८ | ३५.५६ | ४०.६४ | ४५.७२ |
| १०.१६ | १०.१६ | २०.३२ | ३०.४८ | ४०.६४ | ५०.८ | ६०.९६ | ७१.१२ | ८१.२८ | ९१.४४ |
| २५.४ | २५.४ | ५०.८ | ७६.२ | १०१.६ | १२७ | १५२.४ | ७११.८ | २०३.२ | २२८.६ |
परीक्षण अवस्था:
हेलिकप्टर ड्राइभ, र्याम्पिङ बिना, आधा माइक्रो-स्टेपिङ, ड्राइभ भोल्टेज ४०V
आवेदन क्षेत्रहरू
थ्रीडी प्रिन्टिङ:प्रिन्ट हेडको स्थिति र चाल नियन्त्रण गर्न थ्रीडी प्रिन्टरहरूमा ५७ मिमी हाइब्रिड स्टेपर मोटरहरू व्यापक रूपमा प्रयोग गरिन्छ।
सीएनसी मेसिन उपकरणहरू:कम्प्युटर न्यूमेरिकल कन्ट्रोल (CNC) मेसिन टुल्समा, सटीक मेसिनिङ अपरेशनको लागि काट्ने उपकरणहरूको चाल नियन्त्रण गर्न ५७ मिमी हाइब्रिड स्टेपर मोटरहरू प्रयोग गरिन्छ।
स्वचालन उपकरण:५७ मिमी हाइब्रिड स्टेपर मोटरहरू विभिन्न स्वचालन उपकरणहरूमा प्रयोग गर्न सकिन्छ, जस्तै स्वचालित प्याकेजिङ मेसिनहरू, स्वचालित क्रमबद्ध प्रणालीहरू, स्वचालित एसेम्बली लाइनहरू, आदि, चाल र स्थिति नियन्त्रण गर्न।
कपडा मेसिनरी:कपडा उद्योगमा, कपडा प्रक्रियाको शुद्धता र स्थिरता सुनिश्चित गर्न स्पिनिङ मेसिन, लुम र अन्य उपकरणहरू नियन्त्रण गर्न ५७ मिमी हाइब्रिड स्टेपर मोटरहरू प्रयोग गर्न सकिन्छ।
चिकित्सा उपकरण:५७ मिमी हाइब्रिड स्टेपर मोटरहरू सटीक स्थिति नियन्त्रण र गति नियन्त्रणको लागि मेडिकल सिरिन्ज पम्पहरू, मेडिकल रोबोटहरू, छवि स्क्यानिङ उपकरणहरू, आदि जस्ता चिकित्सा उपकरणहरूमा व्यापक रूपमा प्रयोग गरिन्छ।
रोबोटिक्स:५७ मिमी हाइब्रिड स्टेपर मोटरहरू सटीक गति र हेरफेरको लागि औद्योगिक रोबोट, सेवा रोबोट, सहयोगी रोबोट, आदि सहित विभिन्न रोबोटिक्स अनुप्रयोगहरूमा प्रयोग गरिन्छ।
स्वचालित भण्डारण प्रणालीहरू:स्वचालित गोदाम र रसद प्रणालीहरूमा, ५७ मिमी हाइब्रिड स्टेपर मोटरहरू कन्वेयर बेल्ट, लिफ्ट, स्ट्याकर क्रेन र अन्य उपकरणहरू नियन्त्रण गर्न प्रयोग गर्न सकिन्छ जसले वस्तुहरूको सही स्थिति र ह्यान्डलिङ प्राप्त गर्दछ।
यी ५७ मिमी हाइब्रिड स्टेपर मोटर्सका केही विशिष्ट अनुप्रयोगहरू मात्र हुन्, र वास्तवमा, तिनीहरू मुद्रण उपकरण, सुरक्षा प्रणाली, सटीक उपकरणहरू, र यस्तै अन्य धेरै क्षेत्रहरूमा व्यापक रूपमा प्रयोग गरिन्छ।
फाइदा
उच्च टर्क-टु-साइज अनुपात:कम्प्याक्ट आकारको बावजुद, ५७ मिमी हाइब्रिड स्टेपर मोटरहरूले उच्च टर्क आउटपुट प्रदान गर्न सक्छन्। यसले तिनीहरूलाई सीमित ठाउँ भएको तर उच्च टर्क आवश्यक पर्ने अनुप्रयोगहरूको लागि उपयुक्त बनाउँछ।
खुला-लूप नियन्त्रण:हाइब्रिड स्टेपर मोटरहरू खुला-लूप नियन्त्रण प्रणालीमा सञ्चालन गर्न सक्छन्, जसको अर्थ तिनीहरूलाई एन्कोडरहरू जस्ता स्थिति प्रतिक्रिया उपकरणहरूको आवश्यकता पर्दैन। यसले नियन्त्रण प्रणालीलाई सरल बनाउँछ र समग्र लागत घटाउँछ।
सटीक स्थिति:हाइब्रिड स्टेपर मोटरहरूले तिनीहरूको अन्तर्निहित स्टेप रिजोल्युसनको कारणले सटीक स्थिति क्षमताहरू प्रदान गर्दछ। तिनीहरू सानो वृद्धिमा सार्न सक्छन्, जसले गर्दा सही स्थिति र दोहोरिने क्षमताको लागि अनुमति मिल्छ।
सहज सञ्चालन:हाइब्रिड स्टेपर मोटरहरूले सहज सञ्चालन प्राप्त गर्न सक्छन्, विशेष गरी जब माइक्रोस्टेपिङ प्रविधिहरू प्रयोग गरेर चलाइन्छ। माइक्रोस्टेपिङले प्रत्येक चरणलाई साना उप-चरणहरूमा विभाजन गर्दछ, जसले गर्दा सहज गति र कम्पन कम हुन्छ।
द्रुत प्रतिक्रिया समय:हाइब्रिड स्टेपर मोटरहरूमा छिटो प्रतिक्रिया समय हुन्छ, जसले गर्दा द्रुत गति र गति घट्छ। यो सुविधा गतिशील र चुस्त चालहरू आवश्यक पर्ने अनुप्रयोगहरूको लागि लाभदायक छ।
उच्च विश्वसनीयता र टिकाउपन:हाइब्रिड स्टेपर मोटरहरू तिनीहरूको बलियोपन र विश्वसनीयताको लागि परिचित छन्। तिनीहरूको सञ्चालन जीवन लामो छ, मर्मतसम्भारको आवश्यकता कम छ, र कठोर सञ्चालन अवस्थाहरू सामना गर्न सक्छन्।
लागत-प्रभावी समाधान:सर्वो मोटर्स जस्ता अन्य गति नियन्त्रण प्रविधिहरूको तुलनामा, हाइब्रिड स्टेपर मोटर्सले सामान्यतया बढी लागत-प्रभावी समाधान प्रदान गर्दछ। तिनीहरूले प्रदर्शन र किफायती बीच राम्रो सन्तुलन प्रदान गर्दछ।
सजिलो एकीकरण:हाइब्रिड स्टेपर मोटरहरू व्यापक रूपमा उपलब्ध छन् र विभिन्न ड्राइभ इलेक्ट्रोनिक्स र नियन्त्रण प्रणालीहरूसँग उपयुक्त छन्। तिनीहरूलाई विभिन्न प्रकारका मेसिनरी र स्वचालन सेटअपहरूमा सजिलै एकीकृत गर्न सकिन्छ।
ऊर्जा दक्षता:हाइब्रिड स्टेपर मोटरहरूले गतिमा हुँदा मात्र शक्ति खपत गर्छन्, जसले गर्दा तिनीहरूलाई ऊर्जा-कुशल बनाउँछ। जब तिनीहरू स्थिर हुन्छन्, तिनीहरूलाई निरन्तर शक्तिको आवश्यकता पर्दैन, जसले समग्र ऊर्जा बचतमा योगदान पुर्याउँछ।
मोटर चयन आवश्यकताहरू:
► चाल/माउन्टिङ दिशा
► लोड आवश्यकताहरू
►स्ट्रोक आवश्यकताहरू
►अन्त मेसिनिंग आवश्यकताहरू
►सटीक आवश्यकताहरू
► एन्कोडर प्रतिक्रिया आवश्यकताहरू
►म्यानुअल समायोजन आवश्यकताहरू
►वातावरणीय आवश्यकताहरू
उत्पादन कार्यशाला


-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)
-300x300.jpg)