




३५BYJ४६ स्थायी चुम्बक स्टेपर मोटर ३५ मिमी स्टेपर मोटर गियरबक्स सहित
विवरण
३५BYJ४६ गियरहरू भएको ३५ मिमी व्यासको स्थायी चुम्बक मोटर हो।
यो मोटरको गियर अनुपात १/८५ छ र यो हाम्रो मानक सिंगल पोल ४ फेज स्टेपर मोटर हो जसको माथि ८५ गियर अनुपात गियरबक्स छ, त्यसैले स्टेप कोण ७.५°/८५ छ।
ग्राहकहरूले छनौट गर्न २५:१, ३०:१, ४१.६:१, ४३.७५:१ को गियरबक्स गियर अनुपात पनि उपलब्ध छन्।
यो मोटर १२V DC ड्राइभको लागि उपयुक्त छ। २४V भोल्टेज पनि उपलब्ध छ।
यो स्टेपर मोटर यसको सस्तो मूल्य र भरपर्दो प्रदर्शनको कारणले गर्दा सबै उद्योगहरूमा व्यापक रूपमा प्रयोग गरिएको छ, र हरेक वर्ष ठूलो मात्रामा उत्पादन गरिन्छ।
निरन्तर उत्पादनले यस मोटरको गुणस्तर धेरै स्थिर बनाउँछ र मूल्य अन्य मोटरहरू भन्दा कम छ।
सामान्य PM युनिपोलर स्टेपर मोटर चालकहरूले यो मोटर चलाउन सक्षम छन्।
यदि तपाईं इच्छुक हुनुहुन्छ भने, कृपया हामीलाई सम्पर्क गर्न नहिचकिचाउनुहोस्।

प्यारामिटरहरू
| भोल्टेज (V) | प्रतिरोध(ओह) | पुल-इन टर्क १००PPS(mN*m) | डिटेन्ट टर्क(mN*m) | अनलोड पुल-इन फ्रिक्वेन्सी (PPS) |
| 12 | 40 | ≥१९८ | ≥७८.४ | ≥३५० |
| 12 | १०० | ≥१६६ | ≥७८.४ | ≥३५० |
| 24 | १३० | ≥१४७ | ≥७८.४ | ≥३५० |
| 24 | ४०० | ≥१६८ | ≥७८.४ | ≥३५० |
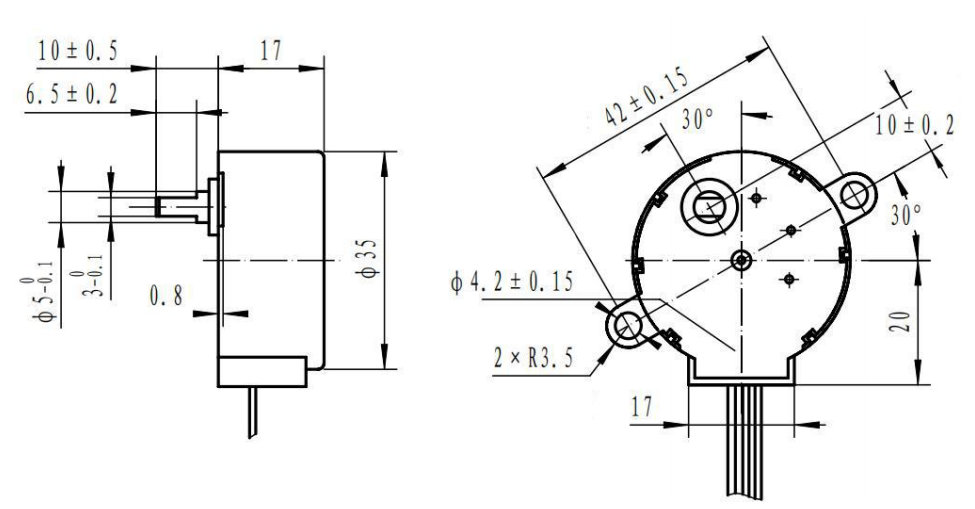
डिजाइन रेखाचित्र: आउटपुट शाफ्ट अनुकूलन योग्य
अनुकूलन योग्य ltems
गियर अनुपात,
भोल्टेज: ५-२४V,
गियर अनुपात,
गियर सामग्री,
आउटपुट शाफ्ट,
मोटरको क्याप डिजाइन अनुकूलन योग्य
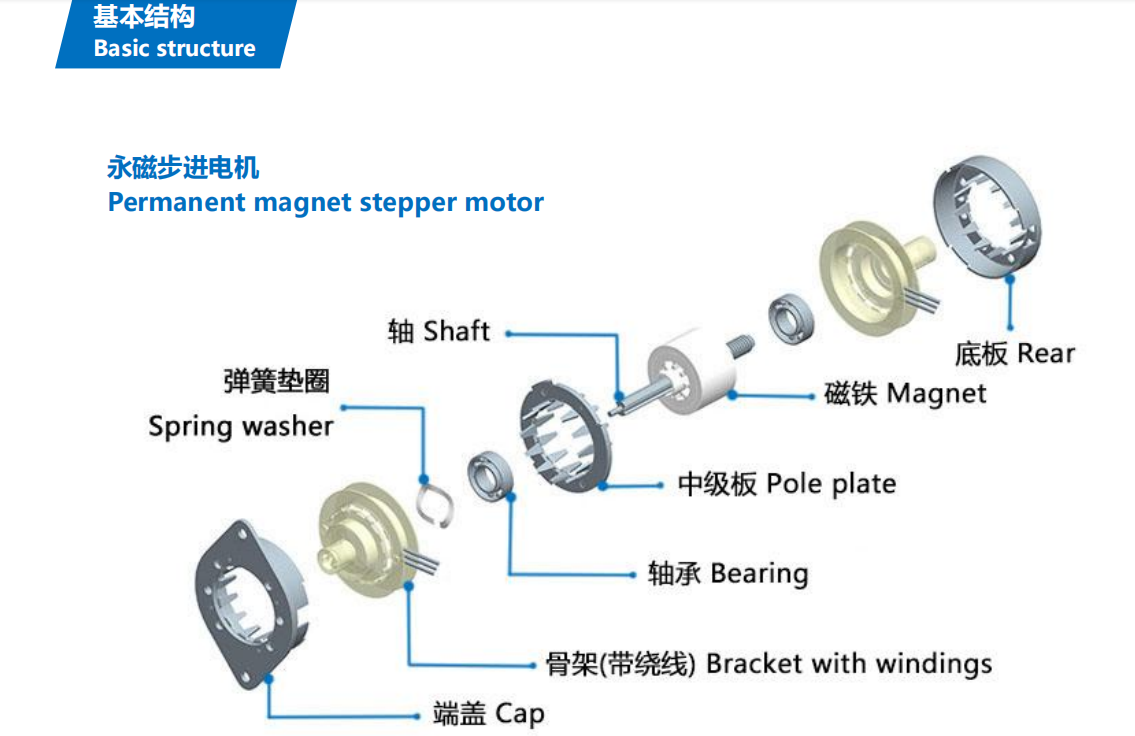
PM स्टेपर मोटरको आधारभूत संरचनाको बारेमा
सुविधाहरू र फाइदा
१. उच्च परिशुद्धता स्थिति
स्टेपरहरू सटीक दोहोरिने चरणहरूमा सर्ने भएकोले, तिनीहरू सटीक आवश्यक पर्ने अनुप्रयोगहरूमा उत्कृष्ट हुन्छन्
मोटरले चल्ने चरणहरूको संख्या अनुसार स्थिति निर्धारण
२. उच्च परिशुद्धता गति नियन्त्रण
चालको सटीक वृद्धिले प्रक्रियाको लागि घुमाउने गतिको उत्कृष्ट नियन्त्रणको लागि पनि अनुमति दिन्छ।
स्वचालन र रोबोटिक्स। घुमाउने गति पल्सको आवृत्तिद्वारा निर्धारण गरिन्छ।
३. पज र होल्डिङ प्रकार्य
ड्राइभ नियन्त्रणको साथ, मोटरमा लक प्रकार्य हुन्छ (मोटर विन्डिङहरू मार्फत करेन्ट हुन्छ, तर
मोटर घुम्दैन), र अझै पनि होल्डिङ टर्क आउटपुट छ।
४. लामो आयु र कम विद्युत चुम्बकीय हस्तक्षेप
स्टेपर मोटरमा ब्रश छैन, र ब्रश गरिएको जस्तै ब्रशले कम्युटेट गर्नु पर्दैन।
डीसी मोटर। ब्रशको कुनै घर्षण हुँदैन, जसले सेवा जीवन बढाउँछ, विद्युतीय स्पार्क हुँदैन, र विद्युत चुम्बकीय हस्तक्षेप कम गर्छ।
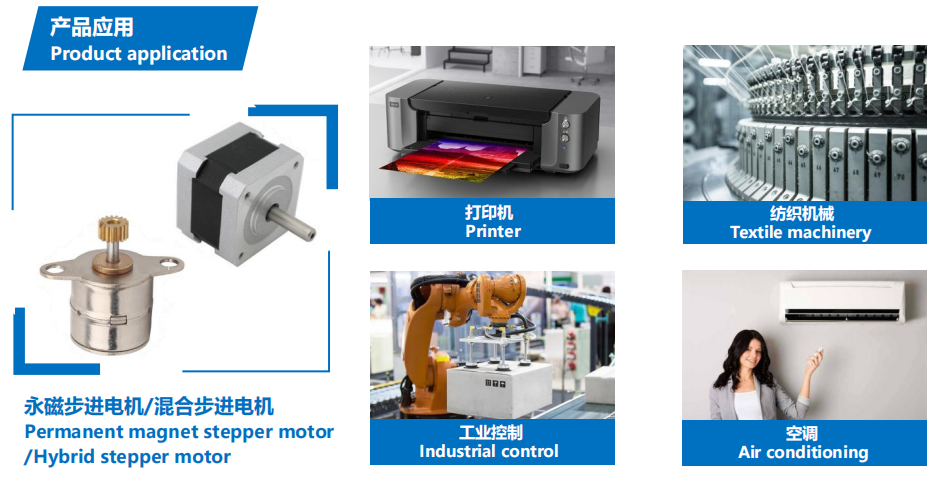
PM स्टेपर मोटरको प्रयोग
प्रिन्टर,
कपडा मेसिनरी,
औद्योगिक नियन्त्रण,
सेनेटरी वेयर,
थर्मोस्टेटिक भल्भ,
तातो पानीको धारा,
पानीको तापक्रमको स्वचालित समायोजन
ढोकाका तालाहरू
वातानुकूलित
पानी शुद्धीकरण गर्ने भल्भ, आदि।
स्टेपर मोटरको काम गर्ने सिद्धान्त
स्टेपर मोटरको ड्राइभ सफ्टवेयरद्वारा नियन्त्रित हुन्छ। जब मोटर घुमाउन आवश्यक हुन्छ, ड्राइभले
स्टेपर मोटर पल्सहरू लागू गर्नुहोस्। यी पल्सहरूले स्टेपर मोटरहरूलाई निर्दिष्ट क्रममा ऊर्जा दिन्छन्, जसले गर्दा
मोटरको रोटरलाई निर्दिष्ट दिशामा घुमाउन (घडीको दिशामा वा घडीको विपरीत दिशामा)। यसरी
मोटरको उचित घुमाउरोपन महसुस गर्नुहोस्। प्रत्येक पटक मोटरले चालकबाट पल्स प्राप्त गर्दा, यो एक चरण कोण (पूर्ण-चरण ड्राइभको साथ) द्वारा घुम्नेछ, र मोटरको परिक्रमण कोण चालित पल्सहरूको संख्या र चरण कोण द्वारा निर्धारण गरिन्छ।
लिड समय
यदि हामीसँग स्टकमा नमूनाहरू छन् भने, हामी ३ दिनमा नमूनाहरू पठाउन सक्छौं।
यदि हामीसँग स्टकमा नमूनाहरू छैनन् भने, हामीले तिनीहरूलाई उत्पादन गर्नुपर्छ, उत्पादन समय लगभग २० क्यालेन्डर दिन हो।
ठूलो मात्रामा उत्पादनको लागि, लिड समय अर्डर मात्रामा निर्भर गर्दछ।
प्याकेजिङ
नमूनाहरू फोम स्पन्जमा कागजको बक्ससहित प्याक गरिन्छन्, एक्सप्रेसद्वारा पठाइन्छ।
ठूलो मात्रामा उत्पादन, मोटरहरू बाहिर पारदर्शी फिल्म भएको नालीदार कार्टनहरूमा प्याक गरिन्छ। (हवाईबाट ढुवानी)
यदि समुद्रबाट पठाइयो भने, उत्पादन प्यालेटहरूमा प्याक गरिनेछ।

भुक्तानी विधि र भुक्तानी सर्तहरू
नमूनाहरूको लागि, सामान्यतया हामी Paypal वा alibaba स्वीकार गर्छौं।
ठूलो मात्रामा उत्पादनको लागि, हामी T/T भुक्तानी स्वीकार गर्छौं।
नमूनाहरूको लागि, हामी उत्पादन अघि पूर्ण भुक्तानी सङ्कलन गर्छौं।
ठूलो मात्रामा उत्पादनको लागि, हामी उत्पादन अघि ५०% पूर्व-भुक्तानी स्वीकार गर्न सक्छौं, र ढुवानी अघि बाँकी ५०% भुक्तानी सङ्कलन गर्न सक्छौं।
हामीले ६ पटक भन्दा बढी अर्डर गरेपछि, हामी अन्य भुक्तानी सर्तहरू जस्तै A/S (दृश्य पछि) वार्ता गर्न सक्छौं।
बारम्बार सोधिने प्रश्न
१. स्थिर गतिमा पुगेपछि घुम्न बन्द गर्ने तर एक्सेलेरेशन पूरा गर्ने स्टेपर मोटरहरूको कारण र समाधानहरू।
कारण: स्टेपर मोटर आफ्नो क्षमता सीमामा चलिरहेको छ र अत्यधिक गतिवर्धकताका कारण रोकिन्छ। रोटर कम्पन हुन्छ र अस्थिर रूपमा चल्छ।
समाधान।
① त्वरण घटाउनुहोस्, अर्थात् कम त्वरण छनौट गर्नुहोस् वा दुई फरक त्वरण स्तरहरू प्रयोग गर्नुहोस्, सुरुमा उच्च र अधिकतम गतिको नजिक कम।
②टर्क बढाउनुहोस्
③पछाडिको शाफ्टमा मेकानिकल ड्याम्पर थप्नुहोस्, तर यसले रोटरको जडत्व बढाउँछ।
④ उपविभाजन ड्राइभ लिनुहोस्




